Digitaler Workflow für medienfreie Greifer: Flexible Greiftechnik aus dem 3D-Druck
Herausforderungen
Greifprozesse in der Automatisierung erfordern häufig den Einsatz externer Medien wie Druckluft oder Hydraulik. Das führt zu zusätzlichem Energiebedarf und erhöhtem Wartungsaufwand. Gleichzeitig wächst der Bedarf an flexiblen Greifsystemen, die sich schnell auf neue Objektgeometrien anpassen lassen.
Lösungen
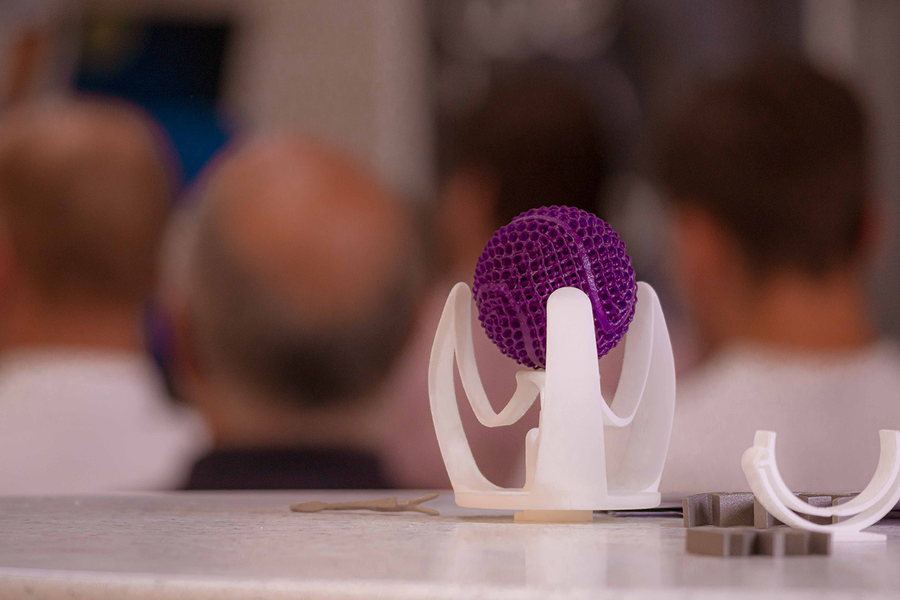
Das Institut für Produktion und Informatik (IPI) der Hochschule Kempten stellte auf der SPS Nürnberg 2025 und der Formnext 2025 einen medienfreien Greifer vor, der ohne externe Energiequellen auskommt. Der additiv hergestellte Greifer basiert auf einem Selbstverriegelungsmechanismus, der allein durch die Bewegung des Roboters aktiviert wird. Das monolithische Design nutzt das Prinzip der Compliant Mechanisms, welches Bewegungen durch elastische Verformungen anstelle von klassischer Gelenken ermöglicht.
Für das Messeexponat wurde der Greifer über eine Schnellwechseltechnik von EOS am Roboter montiert. Dadurch konnten verschiedene objektspezifische Greifer unmittelbar vor Ort ausgetauscht und das Potenzial des Systems demonstriert werden.
Der Greifer wiegt rund 50g und wurde bereits für Objekte bis 100 g unter dynamischen Bewegungen getestet. Die Herstellung erfolgt mittels SLS-3D-Druck und ermöglicht die wirtschaftliche Fertigung kleiner Stückzahlen. Das Konzept befindet sich aktuell im Patentverfahren.
Digitaler Workflow für schnelle Entwicklung
Beim Messeexponat lag der Fokus auf dem digitalen Workflow zur objektspezifischen Greiferanpassung. Die Umsetzung erfolgt über die Plattform Synera.
Zunächst werden geometrische Parameter des Zielobjekts automatisiert erfasst. Auf dieser Basis wird das parametrische CAD-Modell des Greifers iterativ angepasst, bis eine optimale Passform erreicht ist. Anschließend erfolgt die Aufbereitung für die additive Fertigung und der Druck mittels SLS-Verfahren.
Der fertige Greifer ist schnell im Einsatz am Roboter: Über die EOS-Schnellwechseltechnik kann der gedruckte Greifer sofort montiert und getestet werden.
Dieser Prozess reduziert die Entwicklungszeiten deutlich und ermöglicht schnelle Anpassungen an neue Objektformen.
Ausblick
Weitere Tests zur Tragfähigkeit und zur dynamischen Belastung sind geplant.
Perspektivisch eignet sich das System für flexible Montageszenarien und Kleinserienfertigung.
Ein Video zum Messeauftritt auf der SPS Nürnberg 2025 und zur Funktionsweise des Greifers ist auf YouTube verfügbar: Aftermovie SPS 2025

Das könnte Sie auch interessieren




Bayern Innovativ Newsservice
Sie möchten regelmäßige Updates zu den Branchen, Technologie- und Themenfeldern von Bayern Innovativ erhalten? Bei unserem Newsservice sind Sie genau richtig!